設備與材料
個人電腦 × 1
arduino Uno × 1
麵包板 × 1
紅外線發射器 模組 × 1
4×4按鍵 × 1
電晶體 × 1
電阻 22Ω× 1
電阻 100Ω× 1
連接線 若干
實體接線圖

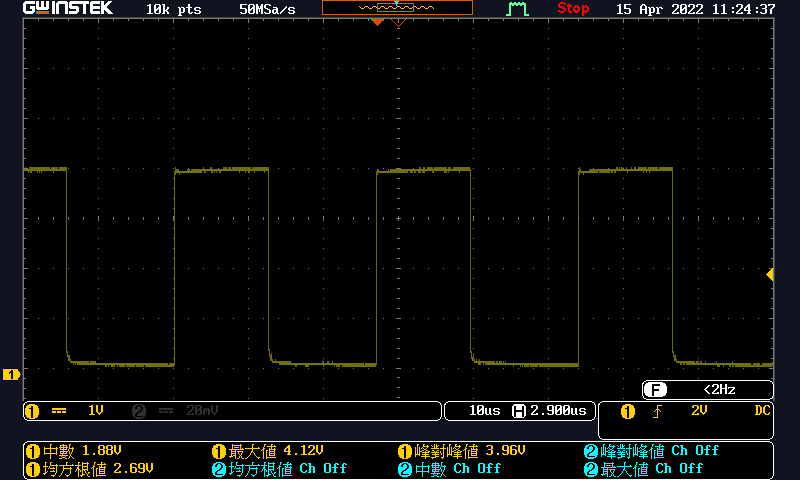
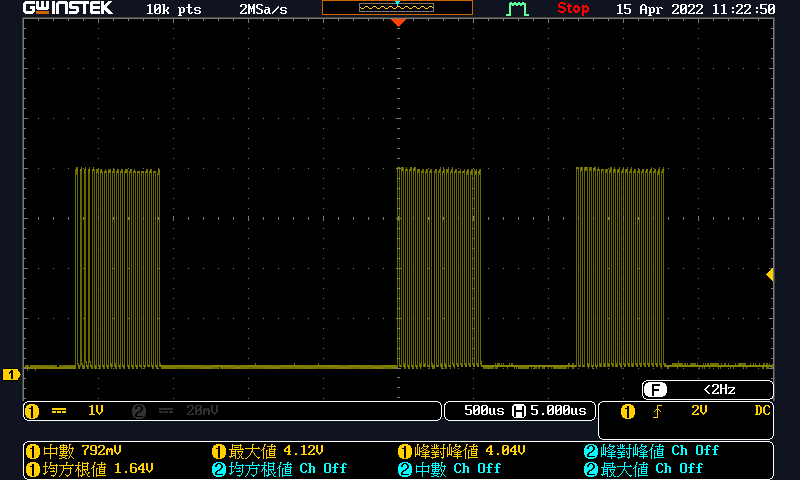
輸出波形
參考程式
因為要產生精準的38kHz方波載波來驅動紅外線,因此不用 arduino 提供的 delay() 或 delayMicroseconds() 函式,而是在 arduino 內使用組合語言指令 nop ,1個 nop 指令需要1個週期的時間,以 arduino Uno 16MHz的石英振盪器來說,1個週期的時間=0.0625μs,16個 nop 指令,剛好是 1μs。因此定義一個 delay1us 巨集,delay1us 就等於 插入 16 個 nop 指令的組合語言。
/* Arduino 紅外線發射實習 EPSON 投影機控制
* S1 電源鍵 S2 黑幕鍵 S3 鎖定鍵
*/
#define NEC
#define IR_send_pin 3 //紅外線控制腳
#define EPSON_START_MARK 9000
#define EPSON_START_SPACE 4500
#define EPSON_ONE_MARK 550
#define EPSON_ONE_SPACE 1550
#define EPSON_ZERO_MARK 550
#define EPSON_ZERO_SPACE 600
#define EPSON_END_MARK 600
#define EPSON_END_SPACE 30000
//定義巨集 直接插入組合語言 16次 nop 指令
#define delay1us __asm__("nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t""nop\n\t");
const int PB[4] = {10, 11, 12}; //輸入接腳
boolean s1; //按鈕狀態變數
boolean s2; //按鈕狀態變數
boolean s3; //按鈕狀態變數
unsigned char POWER[] = {0x83, 0x55, 0x90, 0x6F };
unsigned char FREEZE[] = {0x83, 0x55, 0x92, 0x6D };
unsigned char MUTE[] = {0x83, 0x55, 0x93, 0x6C };
void setup() {
pinMode( IR_send_pin, OUTPUT ); // 設定輸出腳
pinMode( 13, OUTPUT ); // 設定輸出腳
digitalWrite(IR_send_pin, LOW);
//設定 Arduino 輸入接腳 上接電阻模式
for (int i = 0; i < 3; i++) {
pinMode(PB[i],INPUT_PULLUP);
}
}
void loop() {
s1 = !digitalRead(PB[0]); // 讀取S1按鈕的狀態
s2 = !digitalRead(PB[1]); // 讀取S2按鈕的狀態
s3 = !digitalRead(PB[2]); // 讀取S3按鈕的狀態
if(s1){
//電源
digitalWrite(13, HIGH);
NECsend(POWER, 4);
delay(300);
digitalWrite(13, LOW);
}else if(s2){
//設定鎖定畫面取消
digitalWrite(13, HIGH);
NECsend(FREEZE, 4);
delay(300);
digitalWrite(13, LOW);
}else if(s3){
//設定黑畫面或取消黑畫面
digitalWrite(13, HIGH);
NECsend(MUTE, 4);
delay(300);
digitalWrite(13, LOW);
}
}
void NECsend(unsigned char buf[], int len) {
byte data;
//啟始位元
mark(EPSON_START_MARK);
space(EPSON_START_SPACE);
//資料位元
for (byte i = 0; i < len; i++) {
data = buf[i];
for (byte j = 0; j < 8; j++) {
if ((1 << j & data)) {
mark(EPSON_ZERO_MARK);
space(EPSON_ONE_SPACE);
} else {
mark(EPSON_ZERO_MARK);
space(EPSON_ZERO_SPACE);
}
}
}
//結束位元
mark(EPSON_END_MARK);
space(EPSON_END_SPACE);
}
//紅外線接腳輸出38kHz方波 time us
//16M 石英振盪器 產生 38kHz 方波,高電位 12.2us 低電位 14.4us 共 time us
void mark(int time) {
unsigned long beginTime = micros();
unsigned long endTime = (unsigned long)time;
unsigned long nowTime = micros();
while (nowTime - beginTime < endTime) {
/****************************************
* HI = 3+8 = 11us 從示波器觀察約12.2us, *
* 有1.2us誤差 *
*****************************************/
digitalWrite(IR_send_pin, HIGH); //48 clock = 48*0.0625 u = 3us
delay1us;delay1us;delay1us;delay1us;
delay1us;delay1us;delay1us;delay1us; //8*16*0.0625 us = 8 us
/**************************************************
* LOW = 3+6+1.8125=10.8125us + while 迴圈時間 *
* 從示波器觀察一週約26.6us;26.6-12.2-10.8=3.6us,*
* while 1次迴圈自己佔用的時間約3.6us *
***************************************************/
digitalWrite(IR_send_pin, LOW); //48 clock = 48*0.0625 u = 3us
delay1us;delay1us;delay1us;
delay1us;delay1us;delay1us; //6*16*0.0625 us = 6 us
nowTime = micros(); //29 clock = 29*0.0625 u = 1.8125 us
}
}
//紅外線接腳低電位 time us
void space(int time) {
digitalWrite(IR_send_pin, LOW); //48 clock = 48*0.0625 u = 3us
unsigned long beginTime = micros(); //29 clock = 29*0.0625 u = 1.8125 us
unsigned long endTime = (unsigned long)time-6;
unsigned long nowTime = micros(); //29 clock = 29*0.0625 u = 1.8125 us
while (nowTime - beginTime < endTime) {
nowTime = micros(); //29 clock = 29*0.0625 u = 1.8125 us
}
}
其它功能鍵
Menu 0x659A5583
ESC 0x7B845583
向上 0x4FB05583
向下 0x4DB25583
computer 0x6B945583
Video 0x8F705583
1 0xC03F5583
3 0xDC235583
4 0xBC435583
5 0xBE415583
7 0x619E5583
Arduino 輸出實習(單燈閃爍)
Arduino 輸出實習(跑馬燈-愚公移山)
Arduino 輸出實習(跑馬燈-for迴圈)
Arduino 數位輸入實習
Arduino 數位輸入實習(INPUT_PULLUP)
Arduino 類比輸入實習
Arduino PWM 實習 (呼吸燈)
Arduino PWM 實習 (光感應調光燈)
Arduino 8×8 LED Matrix MAX7219 實習
Arduino 紅綠燈小綠人 實習
Arduino 計時器 實習
Arduino 音樂盒
Arduino 電子琴(鍵盤掃描)
Arduino DHT11 溫濕度感應器
Arduino OLED 顯示
Arduino 超音波測距模組 HC-SR04
Arduino 執行時間實習
Arduino 電容測試器
Arduino 紅外線接收實習
Arduino 紅外線發射實習 EPSON 投影機控制
ESP-12F 網路智慧開關(MQTT)
ESP-12F 雲端記錄型 K-Type 溫度計(MQTT ThingSpeak)
ESP-12F 手機雲端紅外線控制
ESP-12F 網路電台收音機
ESP-12F 電子鼓